多形态双足机器人:可行走的不倒翁
来源:新华网 时间:2024-11-01 11:11:25
由深圳逐际动力科技有限公司研发的双足机器人TRON 1,采用“三合一”模块化足端设计,内置高性能运动控制算法。机器人配备三种足端,兼顾人形机器人双腿结构的简易构型,多种足端灵活切换,根据需求可搭载雷达、机械臂、相机等多样化扩展配件,抗击打能力强,用脚踹也不倒。
标签:
-
 全球市场容得下中美欧车企同台竞技 全球市场足够大,容得下各国企业各显神通;巴黎车展的展位足够多,
全球市场容得下中美欧车企同台竞技 全球市场足够大,容得下各国企业各显神通;巴黎车展的展位足够多, -
 超强台风“康妮”登陆台东 全台停工停课 中新网10月31日电 综合报道,超强台风康妮于31日13时40分在台湾台
超强台风“康妮”登陆台东 全台停工停课 中新网10月31日电 综合报道,超强台风康妮于31日13时40分在台湾台 -
 湖北荆门发力装配式产业 绿色低碳建设助城市更新 中新网湖北荆门10月27日电(吴淘淘 李慧敏)以向绿向新向未来 乐享
湖北荆门发力装配式产业 绿色低碳建设助城市更新 中新网湖北荆门10月27日电(吴淘淘 李慧敏)以向绿向新向未来 乐享 -
 南阳市宛城区法院:“法院+银行”协同发力,推动防范化解金融风险 为进一步推进金融审判执行良性发展,加强金融领域风险防范化解,维护金
南阳市宛城区法院:“法院+银行”协同发力,推动防范化解金融风险 为进一步推进金融审判执行良性发展,加强金融领域风险防范化解,维护金 -
 驿城区党的创新理论万场宣讲进基层暨“百姓宣讲直通车”宣讲巡演走进驻马店市驿城... 为深入学习贯彻党的二十届三中全会精神,进一步丰富基层文化生活,畅通
驿城区党的创新理论万场宣讲进基层暨“百姓宣讲直通车”宣讲巡演走进驻马店市驿城... 为深入学习贯彻党的二十届三中全会精神,进一步丰富基层文化生活,畅通 -
 第三届海峡两岸农业文化交流活动在长沙开幕 中新网长沙10月21日电 (付敬懿)第三届海峡两岸农业文化交流活动开
第三届海峡两岸农业文化交流活动在长沙开幕 中新网长沙10月21日电 (付敬懿)第三届海峡两岸农业文化交流活动开
- 护航低空经济“高飞” 低空智联网迎多方布局  从无人机穿行在高楼大厦间送外卖,到无人机跨海岛医疗物资配
- 护航低空经济“高飞” 低空智联网迎多方布局  从无人机穿行在高楼大厦间送外卖,到无人机跨海岛医疗物资配
- 护航低空经济“高飞” 低空智联网迎多方布局  从无人机穿行在高楼大厦间送外卖,到无人机跨海岛医疗物资配
-
 2024年安徽省青少年棋类锦标赛(象棋)在休宁县举行 10月19日至20日,2024年安徽省青少年棋类锦标赛(象棋)在风景秀丽的
2024年安徽省青少年棋类锦标赛(象棋)在休宁县举行 10月19日至20日,2024年安徽省青少年棋类锦标赛(象棋)在风景秀丽的 - 多形态双足机器人:可行走的不倒翁 由深圳逐际动力科技有限公司研发的双足机器人TRON 1,采用三合一模
- 货车出险一次第二年保费上涨吗?货车报废年限是多少年? 货车出险一次第二年保费上涨吗?货车出险一次,第二年的保费可能会上
-
 乘龙H5充换电一体牵引车亮相领城建车辆新能源化 9月25日,2024中国市政工程建设产业博览会在星城长沙开幕,汇聚了行
乘龙H5充换电一体牵引车亮相领城建车辆新能源化 9月25日,2024中国市政工程建设产业博览会在星城长沙开幕,汇聚了行 -
 黄山市徽州区:创客云集西溪南 同筑“绿野仙踪”梦 10月20日,走进徽州区西溪南古村落,不少身着汉服、旗袍的游客穿梭
黄山市徽州区:创客云集西溪南 同筑“绿野仙踪”梦 10月20日,走进徽州区西溪南古村落,不少身着汉服、旗袍的游客穿梭 -
 百名外国留学生走进徽州区 感受千年古村乡建乡创气息 10月26日,由安徽省外国留学生教育管理学会主办,黄山学院与安徽工
百名外国留学生走进徽州区 感受千年古村乡建乡创气息 10月26日,由安徽省外国留学生教育管理学会主办,黄山学院与安徽工 - 大雾黄色预警:京津冀等7省区市部分地区有大雾 中央气象台11月1日06时继续发布大雾黄色预警:11月1日早晨至上午,
- 千博助千企 汇聚新动能 近日,一场以聚力向新 绿动未来为主题的绿色石化与新材料产业青年
- 山西加快推动二手房转移登记与水电气热联动过户“一件事”落地 近日,省自然资源厅会同省住房和城乡建设厅、省行政审批服务管理局
- 前三季度江苏经济发展数据观察:看潜力,增强韧性稳健前行 前三季度全省地区生产总值同比增长5 7%——面对复杂严峻的国内外形
-
 歙县上丰姬川:柿子红秋景浓 山村休闲体验丰富多彩 霜降节气过后,安徽黄山歙县上丰乡上丰村姬川自然村的600多亩高山灯
歙县上丰姬川:柿子红秋景浓 山村休闲体验丰富多彩 霜降节气过后,安徽黄山歙县上丰乡上丰村姬川自然村的600多亩高山灯 -
 “美好安徽与世界对话”走进联合国 记者从安徽省文化和旅游厅了解到,美好安徽与世界对话2024安徽文旅(
“美好安徽与世界对话”走进联合国 记者从安徽省文化和旅游厅了解到,美好安徽与世界对话2024安徽文旅( -
 第七届世界声博会在合肥开幕 10月24日,第七届世界声博会暨2024科大讯飞全球1024开发者节在合肥
第七届世界声博会在合肥开幕 10月24日,第七届世界声博会暨2024科大讯飞全球1024开发者节在合肥 - 交强险出险后第二年涨多少?修车2000以内走交强险划算吗? 交强险出险后第二年涨多少?交强险出险后第二年的保费是否会上涨,要
- 隧道直流供电智能照明系统在文泰高速投入使用 浙江交通集团高速公路温州管理中心自主研发的基于直流照明的智慧照
-
 智慧小方舱助力乡村产业振兴 在广西百色市德保县城关镇那造村食用菌生产基地,村民在智能小方舱
智慧小方舱助力乡村产业振兴 在广西百色市德保县城关镇那造村食用菌生产基地,村民在智能小方舱 - 山西前三季度经济运行情况公布 经济总体呈现稳定恢复态势 10月31日,省统计局发布前三季度全省经济运行情况,三次产业稳步增
- 用心用情改善就医感受提升患者体验 坚持以患者为中心,持续改善就医感受,提升患者体验,保障人民健康
- 国际金价冲向3000美元大关,金店闭店潮还未结束 受美国大选、地缘政治风险影响,国际金价近期一度逼近2800美元大关
- 多地有序推进城市更新 为城市高质量发展打开新空间 沿着长江索道南站旁的公路往江边走,便来到位于南滨路马鞍山片区的
- 数九寒天第一九开始于哪一天?2024年入九是哪一天? 数九寒天第一九开始于哪一天?‌数九寒天的第一九开始于冬至当天
- 北京:11月1日起进入本年度森林防火期 记者31日从北京市冬季防灭火工作新闻发布会上获悉,今年北京秋冬季
- 银川:“夜经济”激发消费新动能 近年来,银川将夜经济作为展示城市形象新赛道、带动经济发展新引擎
- 助低空经济“高飞” 低空智联网迎多方布局 新华社北京10月31日电 《经济参考报》10月31日刊发记者郭倩采写的
- 卫星与算力赋能 “网约巴士”完善层级公交  票价两元即可网约公交,北斗云尚巴士10月中旬在湖南省株洲市
- 中文报业精英聚首北京,探讨AI赋能中华文明全球传播 在新一轮科技革命和产业变革中,人工智能是重要发展方向。与会嘉宾
- 从“首秀”“首展”看医疗领域前沿“黑科技”——进博会医疗器械及医药保健展区前瞻 新华社上海10月30日电 题:从首秀首展看医疗领域前沿黑科技——进
- 助低空经济“高飞” 低空智联网迎多方布局 新华社北京10月31日电 《经济参考报》10月31日刊发记者郭倩采写的
- 国内外专家共议智能航运时代到来 随着通信与导航、人工智能等技术的发展,航运自动化、少人化和无人
- 从“首秀”“首展”看医疗领域前沿“黑科技”——进博会医疗器械及医药保健展区前瞻 新华社上海10月30日电 题:从首秀首展看医疗领域前沿黑科技——进
- 卫星与算力赋能 “网约巴士”完善层级公交  票价两元即可网约公交,北斗云尚巴士10月中旬在湖南省株洲市
- 新华全媒头条丨逐梦九天再出征——写在神舟十九号载人飞船发射成功之际 新华社酒泉10月30日电 题:逐梦九天再出征——写在神舟十九号载人
- 新华全媒头条丨逐梦九天再出征——写在神舟十九号载人飞船发射成功之际 新华社酒泉10月30日电 题:逐梦九天再出征——写在神舟十九号载人
-
 五星出东方“一带一路”国际美术大展巡展亮相重庆 10月18日讯五星出东方‘一带一路’国际美术大展重庆巡展
五星出东方“一带一路”国际美术大展巡展亮相重庆 10月18日讯五星出东方‘一带一路’国际美术大展重庆巡展 - 从“首秀”“首展”看医疗领域前沿“黑科技”——进博会医疗器械及医药保健展区前瞻 新华社上海10月30日电 题:从首秀首展看医疗领域前沿黑科技——进
- 新华全媒头条丨逐梦九天再出征——写在神舟十九号载人飞船发射成功之际 新华社酒泉10月30日电 题:逐梦九天再出征——写在神舟十九号载人
- 浙江改革聚焦:母亲河共治共保见新“绿” 据了解,联盟在工作举措上,致力于建立健全流域共治共保工作机制、
- 从“首秀”“首展”看医疗领域前沿“黑科技”——进博会医疗器械及医药保健展区前瞻 新华社上海10月30日电 题:从首秀首展看医疗领域前沿黑科技——进
-
 黄炎培职业教育思想研究会2024学术年会在郑州举行 10月30日,黄炎培职业教育思想研究会2024学术年会暨中华职业教育社
黄炎培职业教育思想研究会2024学术年会在郑州举行 10月30日,黄炎培职业教育思想研究会2024学术年会暨中华职业教育社 - 香港机管局:支持C919飞机在港运作及全球推广 香港机场管理局(机管局)31日公布,机管局已与中国商飞上海飞机客户
- 我国拟2035年全面建成新材料大数据中心体系 新华社北京10月30日电(记者张晓洁、张辛欣)记者10月30日从工业和
-
 年度旗舰满血来袭!一加13正式发布售价 4499 元起 2024 年 10 月 31 日,一加正式发布年度旗舰一加 13。作为一加
年度旗舰满血来袭!一加13正式发布售价 4499 元起 2024 年 10 月 31 日,一加正式发布年度旗舰一加 13。作为一加 - 美国科技巨头持续增加AI基础设施投资  以微软、Meta为代表的美国科技巨头正计划继续增加对人工智能
- 技术创新带动智能网联汽车加速“进化” 近年来,我国智能网联汽车产业紧跟全球发展态势,多项创新技术正推
- 我国拟2035年全面建成新材料大数据中心体系 新华社北京10月30日电(记者张晓洁、张辛欣)记者10月30日从工业和
-
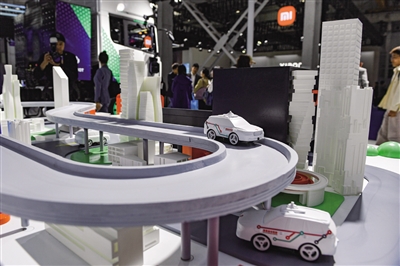 国产智能网联汽车需要实现独立自主安全   图为2024世界智能网联汽车大会展示的自动驾驶智能沙盘
国产智能网联汽车需要实现独立自主安全   图为2024世界智能网联汽车大会展示的自动驾驶智能沙盘 - 持港澳居民来往内地通行证(非中国籍)旅客破万 据拱北边检站统计,自7月31日首批申办港澳居民来往内地通行证(非中
热门资讯
- 年度旗舰满血来袭!一加13正式发布售价 4499 元起 2024 年 10 月 31 日,一加正...
-
 作为科技闪耀亮相美国纽约时代广场纳斯达克大屏,展示中国品牌实力 金秋十月,秋风送爽,在这个丰收的...
作为科技闪耀亮相美国纽约时代广场纳斯达克大屏,展示中国品牌实力 金秋十月,秋风送爽,在这个丰收的... -
 合资新能源「四好生」 MAZDA EZ-6正式上市13.98万-17.98万元 10月26日,2024年长安马自达粉丝盛...
合资新能源「四好生」 MAZDA EZ-6正式上市13.98万-17.98万元 10月26日,2024年长安马自达粉丝盛... -
 天猫精灵与富森美战略签约 全球首店落地富森美 10 月 31 日,阿里巴巴旗下人工...
天猫精灵与富森美战略签约 全球首店落地富森美 10 月 31 日,阿里巴巴旗下人工...
观察
图片新闻
-
 北京链家打造签约服务中心 一站式服务引领房产交易新体验  二手房交易是关乎买卖双方两...
北京链家打造签约服务中心 一站式服务引领房产交易新体验  二手房交易是关乎买卖双方两... -
 CBA常规赛:北京北汽止步6连胜 联赛已无全胜球队 中新网长春10月28日电 (记者 郭...
CBA常规赛:北京北汽止步6连胜 联赛已无全胜球队 中新网长春10月28日电 (记者 郭... -
 河海大学举办建校109周年校庆大会 河海大学举办建校109周年校庆大会...
河海大学举办建校109周年校庆大会 河海大学举办建校109周年校庆大会... -
 “阳明学堂”在贵州中华文化学院正式挂牌 中新网贵阳10月27日电 (王秋旭)27...
“阳明学堂”在贵州中华文化学院正式挂牌 中新网贵阳10月27日电 (王秋旭)27...
精彩新闻
- 美国科技巨头持续增加AI基础设施投资  以微软、Meta为代表的美国科...
- 美国科技巨头持续增加AI基础设施投资  以微软、Meta为代表的美国科...
- 奋力冲刺全年经济目标 地方密集部署工作“拼经济” 距离2024年结束还有两个月,为实现...
- 网络ssid是什么意思?网络ssid怎么填写? 网络ssid是什么意思?ssid其实是Ser...
- 世界中文报业协会第57届年会聚焦人工智能 世界中文报业协会第57届年会30日在...
- 作为科技闪耀亮相美国纽约时代广场纳斯达克大屏,展示中国品牌实力 金秋十月,秋风送爽,在这个丰收的...
- 鱼钩怎么绑呢?鱼钩的物尽其用怎么触发? 鱼钩怎么绑呢?首先将子线沿着吊钩...
- AI技术在汽车上的应用趋势越发显著 【简介】今年以来,盘古、文心一言...
- 宏观政策效应逐步显现 制造业PMI重返景气区间 □ 10月制造业PMI为50 1%,较9月...
- 世界中文报业协会第57届年会聚焦人工智能 世界中文报业协会第57届年会30日在...
- 2025年陕西高考网上报名今日开始 将实行“3+1+2”模式 2025年陕西高考将实行3+1+2模式,...
- 锤炼体魄 衡水二中2024年秋季运动会开幕式举行 接下来,各代表队有序入场。国旗方...
- 我国锅炉行业首个水冷壁数字化智能制造工厂投产运行 工业互联网、工业机器人、机器视觉...
- 朝霞不出门晚霞行千里是什么意思?有雨山戴帽无雨山没腰的简单解释 朝霞不出门晚霞行千里是什么意思?...
- 楼上马桶声音大怎么办?马桶嗡嗡嗡一直响怎么解决? 楼上马桶声音大怎么办?1、安装隔音...
-
 松下将七赴进博会 展示三大业务领域最新成果等 第七届中国国际进口博览会(以下简...
松下将七赴进博会 展示三大业务领域最新成果等 第七届中国国际进口博览会(以下简... - 墙面渗水怎么找漏水点?墙面渗水后多久能干透? 墙面渗水怎么找漏水点?1、视觉检查...
- 守护以旧换新市场秩序 福建市场监管部门在行动  为贯彻落实福建省加力支持消...
- 卫生间瓷砖缝渗水怎么补救?直接在瓷砖上做防水可以吗? 卫生间瓷砖缝渗水怎么补救?1、先将...
-
 焕新了家装·2024领军企业巡礼| 岚庭集团董事长江涛:做家装行业的创新者和颠覆者  编者按:今年以来,《推动大...
焕新了家装·2024领军企业巡礼| 岚庭集团董事长江涛:做家装行业的创新者和颠覆者  编者按:今年以来,《推动大... -
 推动标准迈向国际化 业内人士共同探讨建筑行业未来发展方向  新华网北京10月22日电(记者...
推动标准迈向国际化 业内人士共同探讨建筑行业未来发展方向  新华网北京10月22日电(记者... - 守护以旧换新市场秩序 福建市场监管部门在行动  为贯彻落实福建省加力支持消...
- 对以旧换新骗补、套补行为必须零容忍 政府拿出大量财政资金推动以旧换新...
- 对以旧换新骗补、套补行为必须零容忍 政府拿出大量财政资金推动以旧换新...
-
 尹伯悦:将持续推动产业、技术、标准相融合  新华网北京10月22日电(记者...
尹伯悦:将持续推动产业、技术、标准相融合  新华网北京10月22日电(记者... -
 首届智能建造博览会深圳开幕 致力推动我国智能建造领域产业升级  10月20日,我国建筑行业首个...
首届智能建造博览会深圳开幕 致力推动我国智能建造领域产业升级  10月20日,我国建筑行业首个... - 建设银行邓州支行到花洲街道开展交流座谈 近日,建设银行邓州支行行长石小朴...
-
 广州荣获“国际标准化组织建筑和土木工程标准试点示范城市”  10月18日,2024年国际标准化...
广州荣获“国际标准化组织建筑和土木工程标准试点示范城市”  10月18日,2024年国际标准化... - 居家适老化改造每户最高可享5000元补贴 面向60岁及以上京籍老人  年底前,北京市户籍老人家庭...
- 尹伯悦:将持续推动产业、技术、标准相融合  新华网北京10月22日电(记者...
-
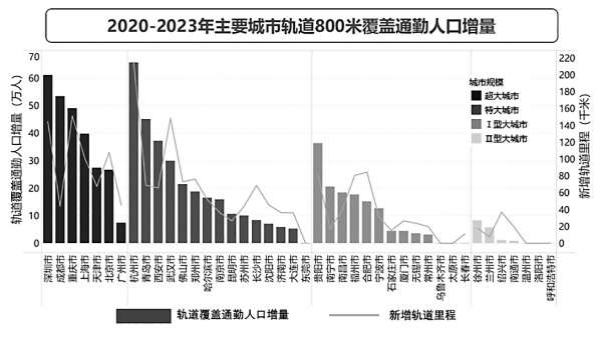 5公里内幸福通勤回归   近日,中国城市规划设...
5公里内幸福通勤回归   近日,中国城市规划设... - 5公里内幸福通勤回归   近日,中国城市规划设...
- 5公里内幸福通勤回归   近日,中国城市规划设...
- 广州荣获“国际标准化组织建筑和土木工程标准试点示范城市”  10月18日,2024年国际标准化...
-
 第六届领航·住房租赁产业论坛召开  近日,第六届领航·住房租赁...
第六届领航·住房租赁产业论坛召开  近日,第六届领航·住房租赁... - 房贷利率下调 为何有的没降到3.30% 据了解,多数银行大部分存量房贷利...
- 京津冀诞生三座“绿城” 今年是京津冀协同发展上升为国家战...
- 北京链家打造签约服务中心 一站式服务引领房产交易新体验  二手房交易是关乎买卖双方两...
- 北京链家打造签约服务中心 一站式服务引领房产交易新体验  二手房交易是关乎买卖双方两...
- 房贷利率下调 为何有的没降到3.30% 据了解,多数银行大部分存量房贷利...
-
 全国住房城乡建设行业职业技能大赛在合肥举办  10月27至28日,2024年全国行...
全国住房城乡建设行业职业技能大赛在合肥举办  10月27至28日,2024年全国行... - 京津冀诞生三座“绿城” 今年是京津冀协同发展上升为国家战...
-
 第十六届边坡工程技术大会在北京落幕  10月21日,第十六届边坡工程...
第十六届边坡工程技术大会在北京落幕  10月21日,第十六届边坡工程... - 城市房地产融资新机制持续发力 今年以来,住房城乡建设部、金融监...
-
 焕新了家装·2024领军企业巡礼|今朝装饰董事长戴江平:坚持长期主义 做“老房装修专家”  编者按:今年以来,《推动大...
焕新了家装·2024领军企业巡礼|今朝装饰董事长戴江平:坚持长期主义 做“老房装修专家”  编者按:今年以来,《推动大... - 山东探索建立农村幸福院——让更多老年人享受到家门口的服务  编者按:党的二十届三中全会...
- 聚焦“双11”·提品质促消费 市场监管总局发布“双11”促销合规提示 为规范促销经营行为,维护双11期间...
-
 电子门锁靠谱吗?怎么选 近年来,电子门锁不断推陈出新,提...
电子门锁靠谱吗?怎么选 近年来,电子门锁不断推陈出新,提... - 装修大包都有哪些项目?装修大包好还是半包好? 装修大包都有哪些项目?装修大包一...
- 厨房下水道很臭怎么办?厨房下水道堵了怎么通? 厨房下水道很臭怎么办?1、疏通下水...